
الگوریتم دستۀ ماهی هاي مصنوعی استاندارد
الگوریتم دستۀ ماهیهاي مصنوعی یکی از الگوریتمهاي هوش جمعی است که بر اساس جمعیت و جستجوي تصادفی کار میکند. این الگوریتم در سال 2002 توسط دکتر Li Xiao Lei ارائه گردید. اساس کار AFSA از روي رفتارهاي اجتماعی ماهیها برگرفته شده و بر مبناي جستجوي تصادفی، جمعیت و رفتارگرایی کار میکند. این الگوریتم داراي خصوصیاتی از جمله سرعت همگرایی بالا، حساس بودن به مقادیر اولیۀ ماهیهاي مصنوعی، انعطاف پذیري و تحمل پذیري خطا میباشد که آنرا براي حل مسائل بهینه سازي قابل قبول می کند. از AFSA در کاربردهاي متعددي از جمله خوشه بندي ، تسطیح منابع ، کنترل PID ، طیف گسترده ، داده کاوي ، دنباله کدگذاري DNA و غیره داشته است.
اما این الگوریتم خیلی مورد توجه قرار نگرفت زیرا داراي پیچیدگی بالایی در مقابل الگوریتمهاي مشابه خود بخصوص PSO بود ولی در عین حال نتایج حاصل از آن از نتایج بدست آمده از PSO بهتر نبود. از معایب AFSA میتوان به پیچیدگی ساختاري بالاي الگوریتم، پیچیدگی محاسباتی بالا، هدر دادن محاسبات، عدم برقراري توازن میان جستجوي سراسري و جستجوي محلی و استفاده نکردن از تجربیات اعضاي دسته براي حرکات بعدي اشاره کرد که در بخشهاي بعدي به بررسی آنها خواهیم پرداخت.
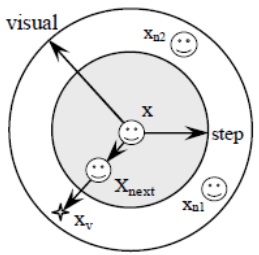
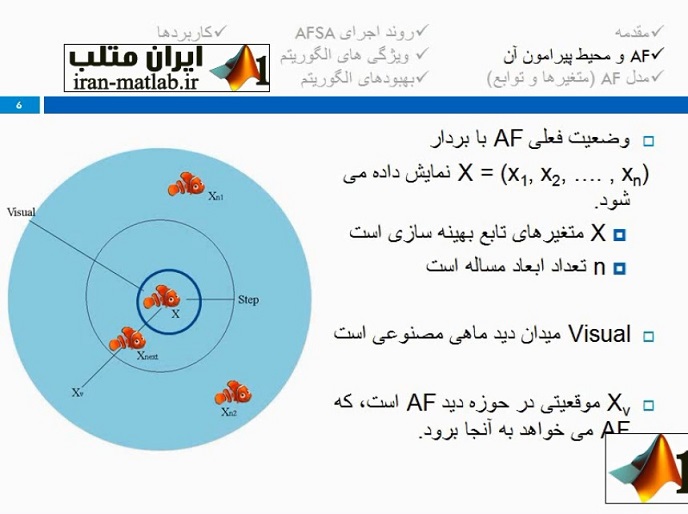
اساس کار AFSA بر پایۀ توابعی است که از رفتارهاي اجتماعی دستۀ ماهیها در طبیعت برگرفته شدهاند. در دنیاي زیر آب، ماهیها میتوانند مناطقی را پیدا کنند که داراي غذاي بیشتري است، که این امر با جستجوي فردي یا گروهی ماهیها محقق میشود. مطابق با این ویژگی، مدل ماهی مصنوعی با رفتارهاي حرکت آزادانه، جستجوي غذا، حرکت گروهی و دنبالهروي ارائه شده است که به وسیلۀ آنها (AF) در آن زندگی میکند اساساً فضاي راهحل و حوزههاي ماهیهاي 29 فضاي مسئله جستجو میشود. محیطی که ماهی مصنوعی مصنوعی دیگر است. درجۀ تراکم غذا در منطقۀ آبی تابع هدف AFSA میباشد. در نهایت، ماهیهاي مصنوعی به مکانی میرسند که درجۀ تراکم و غلظت غذا در آنجا بیشترین (بهینۀ سراسري) باشد. همانطور که در شکل 2 -1 مشاهده میشود، ماهی مصنوعی مفاهیم خارجی را از طریق بینایی درك میکند.
وضعیت فعلی ماهی مصنوعی توسط بردار (X=(x1,x2,…,xn نشان داده میشود. Visual برابر میداندید ماهی مصنوعی میباشد و Xv موقعیتی در می داندید است که ماهی مصنوعی میخواهد به آنجا برود. حال اگر وضعیت XV از نظر تراکم غذایی بهتر از وضعیت فعلی باشد، یک گام به جلو در جهت آن پیش میرویم که باعث تغییر وضعیت ماهی مصنوعی از X به Xnext میشود، ولی اگر وضعیت فعلی بهتر از Xv باشد، به گشتزنی در محدودة میدان دید ادامه میدهیم. Step برابر حداکثر طول گام حرکت است. ماهیهاي مصنوعی دیگري که در محدودة میدان دید یک ماهی مصنوعی قرار دارند، همسایگان آن هستند.
مدل ماهی مصنوعی شامل دو بخش متغیرها و توابع است که متغیرها شامل X (موقعیت فعلی ماهی مصنوعی)، Step (حداکثر طول گام حرکت)، Visual(میدان دید)، try_number (سقف تعداد آزمایش و سعی کردن) و فاکتور شلوغی 0<δ<1) δ) میباشند. همچنین توابع شامل رفتار جستجوي (شکار) غذا، رفتار حرکت گروهی و رفتار دنباله روي(پیروي) میباشند. در تمام توابع AFSA از یک تابع Rand(a,b) استفاده میشود که یک عدد تصادفی با توزیع یکنواخت در بازة [a,b] تولید میکند. فرض میکنیم اندازة جمعیت برابر N و فضاي مسئله Dبعدي است.
رفتار حرکت آزادانه
در طبیعت، هنگامی که ماهیها موفق به یافتن غذا نشوند، به صورت آزادانه حرکت میکنند. در AFSA هنگامی که ماهی مصنوعی نتواند به سمت موقعیتی با مقدار غذاي بیشتر حرکت کند.
رفتار جستجوي غذا
در طبیعت، هر یک از ماهیها، با استفاده از حواس خود همواره به دنبال غذا یا مناطقی با غذاي بیشتر میگردند. اگر Xi موقعیت فعلی ماهی مصنوعی باشد، یک موقعیت Xj را به طور تصادفی در میداندید ماهی مصنوعی انتخاب میکنیم ،f(X) برابر تراکم و غلظت غذا (مقدار تابع هدف) میباشد.
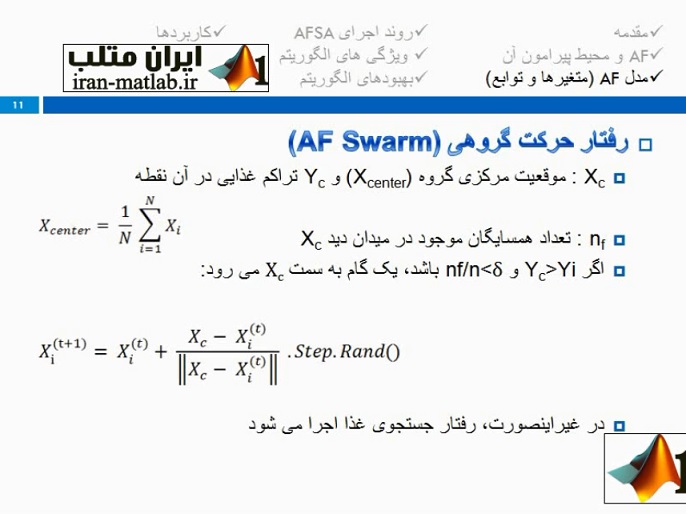
رفتار حرکت گروهی ماهیها
یکی از خاصیتهاي ماهیهایی که به صورت جمعی زندگی میکنند این است که همواره سعی میکنند در کنار دیگر اعضاي دسته حرکت کنند. این امر باعث میشود که دستۀ ماهیها از هم نپاشد و کُُلیت دسته حفظ شود. در AFSA براي اینکه ماهیهاي مصنوعی به صورت یک دسته واحد حرکت کنند و دستۀ ماهیهاي مصنوعی تکه تکه نشود، در هر تکرار سعی میشود تا ماهیهاي مصنوعی، به سمت یک موقعیت مرکزي حرکت کنند. موقعیت مرکزي دسته برابر با مرکزثقل بردارهاي ماهیهاي مصنوعی میباشد.
روند اجراي AFSA
براي ماهیهاي مصنوعی، رفتارهاي جستجوي غذا و حرکت آزادانه رفتارهاي انفرادي هستند، رفتار دنباله روي یک رفتار گروهی است که هر یک از ماهی هاي مصنوعی به صورت محلی بر اساس همسایگان خود آنرا اجرا میکند و رفتار حرکت گروهی یک رفتار گروهی است که تمامی ماهی- هاي مصنوعی به صورت سراسري آنرا اجرا میکنند. رفتار جستجوي غذا در صورتی که یک ماهی مصنوعی با اجراي رفتار دنباله روي و یا حرکت گروهی موفق به حرکت به سمت موقعیت بهتر نشود اجرا میشود و در صورتی که یک ماهی مصنوعی در یافتن موقعیت بهتر با رفتار جستجوي غذا موفق نبود، رفتار حرکت آزادانه را اجرا میکند. در واقع رفتارهاي جستجوي غذا و حرکت آزادانه رفتارهایی هستند که به طور مستقل توسط ماهیهاي مصنوعی اجرا نمیشوند و تنها زمانی اجرا میشوند که یک ماهی مصنوعی نتواند با استفاده از رفتارهاي دنباله روي و حرکت جمعی به سمت یک موقعیت بهتر حرکت کند. در AFSA، در هر گام از فرآیند بهینه سازي، تمامی ماهیهاي مصنوعی به صورت موازي روند یکسانی را طی میکنند.
.
.
.
مدت زمان : 30 دقیقه
.
.
.
تصاویری این فیلم آموزشی :
گنجینه فیلم های آموزشی فارسی الگوریتم های بهینه سازی تکاملی-هوش مصنوعی
| ردیف | عنوان | مدت زمان | لینک |
|---|---|---|---|
| 1 | فیلم آموزش فارسی الگوریتم تکامل گرامری Grammatical Evolution | 35 دقیقه | لینک دریافت (کلیک کنید) |
| 2 | فیلم آموزشی فارسی الگوریتم بازی تکاملی Evolutionary Game Algorithm | 35 دقیقه | لینک دریافت (کلیک کنید) |
| 3 | فیلم آموزش فارسی الگوریتم جستجوی فاخته cuckoo search | 100 دقیقه | لینک دریافت (کلیک کنید) |
| 4 | فیلم آموزش فارسی بررسی قیود در مسائل بهینه سازی مقید | 34 دقیقه | لینک دریافت (کلیک کنید) |
| 5 | فیلم آموزش فارسی الگوریتم دسته ماهی مصنوعی | 30 دقیقه | لینک دریافت (کلیک کنید) |
| 6 | فیلم آموزش فارسی الگوریتم کلونی زنبور عسل | 65 دقیقه | لینک دریافت (کلیک کنید) |
| 7 | فیلم آموزش فارسی بهینه سازی مبتنی بر جغرافیای زیستی | 30 دقیقه | لینک دریافت (کلیک کنید) |
| 8 | فیلم آموزش فارسی الگوریتم ژنتیک در متلب | 190 دقیقه | لینک دریافت (کلیک کنید) |
با سلام
من الگوریتم دسته ماهی های مصنوعی را از سایت شما بع مبلغ 12000 تومان خریداری و مبلغ بصورت پرداخت گردید <ۀی متاسفانه برای من میل نشد لطفا پیگیری بنمایید متشکرم.
سلام
لینک های دانلود برای شما ایمیل شد.
سلام
الان برای دانلود باید چ کار کنم؟
هیچ لینک دانلودی وجود ندارد.
سلام
به لینک زیر مراجعه کنید
لینک دانلود فیلم آموزشی دسته ماهی مصنوعی